Elektronik
Begrenzungsschleife
Der Sender für die Begrenzungsschleife legt ein Signal im Tonfrequenzbereich von
7800 Hertz (7,8 KHz) auf den Begrenzungsdraht. Dieses Signal muss der Mähroboter
detektieren, um das Erreichen der Arbeitsbereichsgrenze zu erkennen.
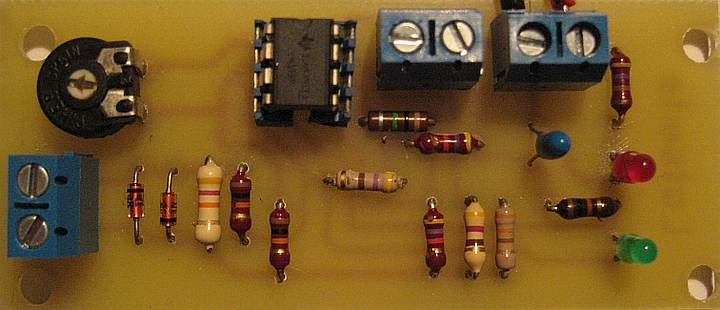
Schaltplan und Erklärung dazu findet man hier:
http://wiki.ardumower.de/index.php?title=Perimeter_wire
Für die beiden Sensorspulen am Mähroboter wurden Spulen aus alten 24 Volt-Relais verwendet.
Die Induktivität der Spulen wurde mit einem Induktivitäts-Messgerät ermittelt.
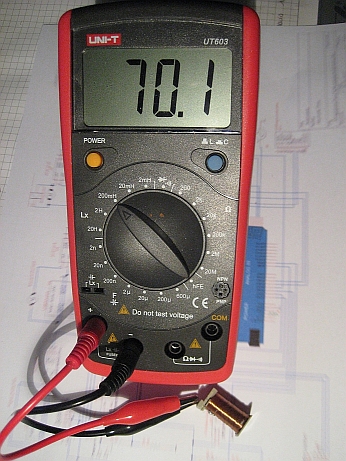
Wenn kein Messgerät vorhanden ist, kann man alternativ mit Windows-PC, Soundkarte und
dem kostenlosen Programm LcMeas http://www.scheidig.de/Deutsch/Download/LcMeas/info.htm
sehr einfach und kostengünstig Induktivitäten und Kapazitäten messen.
Mit der auf diesem Wege ermittelten Induktivität errechnet man mit Hilfe der Formel

oder einfacher mit dem Rechner auf der Webseite von Norbert Lieven
http://www.electronicdeveloper.de/LC_Parallelresinanz.aspx den
benötigten Kondensator, um einen Resonanzkreis für 7800 Hz zu bekommen.
In unserem Fall wird für die ermittelten 70 mH der Spule ein Kondensator
von 5,95 nF benötigt. Es wurde der nächstliegende Wert aus der Normreihe,
also 5,6 nF verwendet.
Gute Erfahrungen wurden auch mit anderen Festinduktivitäten gemacht. Für eine
sichere Detektierung des Magnetfeldes wurden jeweils zwei Spulen pro Seite um 90°
versetzt angeordnet.
Steuerung
Der Schaltplan für die Steuerung hat einen eigenen Menüpunkt erhalten.
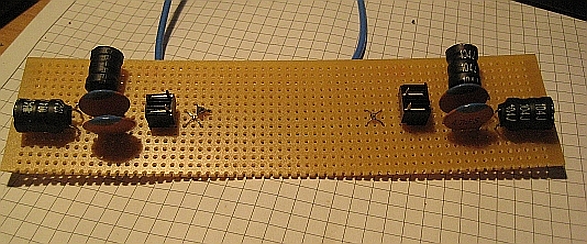
Die praktische Ausführung sieht man hier. Auf einer Hart-PVC-Grundplatte werden die
einzelnen Komponenten montiert. Damit es kein Drahtverhau wird, dient zusätzlich
eine Lochrasterplatine als Montage- und Verdrahtungshilfe.
Für einen Prototyp ist das eine schnelle, einfache und preiswerte Lösung. Je sorgfältiger
man die Verdrahtung plant, um so dichter ist man bereits an einem Layout für eine später
zu erstellende Leiterplatte.
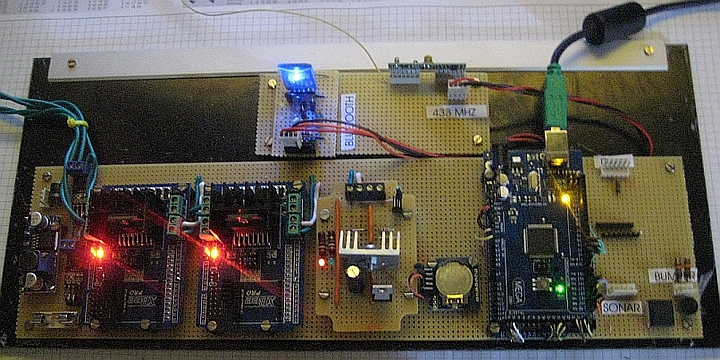
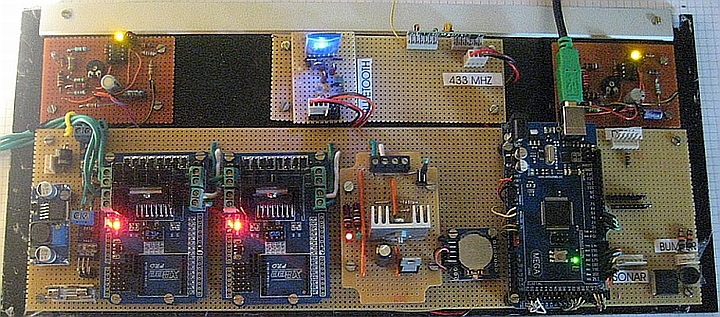
Auch als Prototyp kann man die Steuerung durchaus ordentlich aufbauen. Auf dem aktuellen
Mainboard fehlen noch die beiden Verstärker für die Sensorspulen, dafür sind die freien
Plätze oben links und oben rechts vorgesehen.
In der Mitte links sitzt das Bluetooth-Modul, rechts daneben der 433 MHz-Empfänger.
Hier ist noch Raum für einen Sender. Kompass, Gyro und GPS werden an anderer Stelle
platziert.
Darunter von links nach rechts: Step-Down-Wandler 12 V auf 5 V, 2 Stromsensoren ACS712
für die Radmotoren, 2 Motortreiber für die Radmotoren mit L298, 1 Motortreiber für die
Mähmotoren mit MOSFET IRLIZ44N, 1 Uhrenmodul für die Mähzeiten, darüber kommen noch die
Stromsensoren für die Mähmotoren. Weiter geht es mit dem Arduino Mega und den
Steckverbindern für die Sensoren und das Bedientableau.
Inzwischen wurden die beiden Verstärker mit LM358 oben links und rechts auf dem Mainboard montiert.
Für die beiden Lochraster-Platinen der Verstärker wurden Platinen entworfen. Sie sind inzwischen geätzt, gebohrt und bestückt und werden demnächst eingebaut.