Chassis
Variante 1
Eine Alurahmen-Konstruktion bildet die Basis. Die Bodenplatte, die Seitenteile und das Oberteil
bestehen aus Alu-Verbundplatten. Diese Verbundplatten gibt es in verschiedenen Materialstärken.
Die Kernschicht besteht aus Polyäthylen. Auf beiden Seiten befindet sich ein 0,3 mm starkes
Alublech. Die Teile sind zähelastisch verklebt. Die Vorderseite ist häufig einbrennlackiert,
die Rückseite alumatt. Die Verbundplatte ist leichtgewichtig aber stabil und eignet sich für
Innen- und Außenanwendungen.
Für unseren Selbstbau-Mähroboter haben wir 4 mm Materialstärke gewählt. In Verbindung mit den
Alu-Profilen ergibt sich eine sehr stabile und trotzdem leichtgewichtige Konstruktion. Allerdings
ist ein etwas erhöhter Aufwand für haltbare Befestigungspunkte erforderlich.
Chassis
Variante 2
nach einer Vorlage von Rainer Rebhanhttp://www.ardumower.de/media/kunena/attachments/930/MR2P-vonvorneoben_zu.jpg
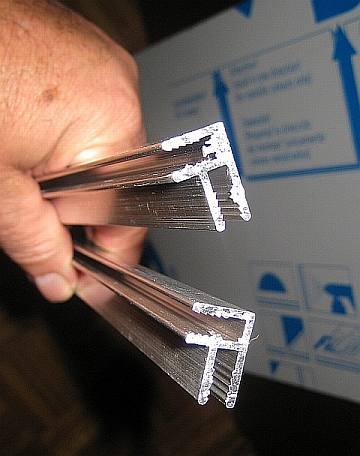
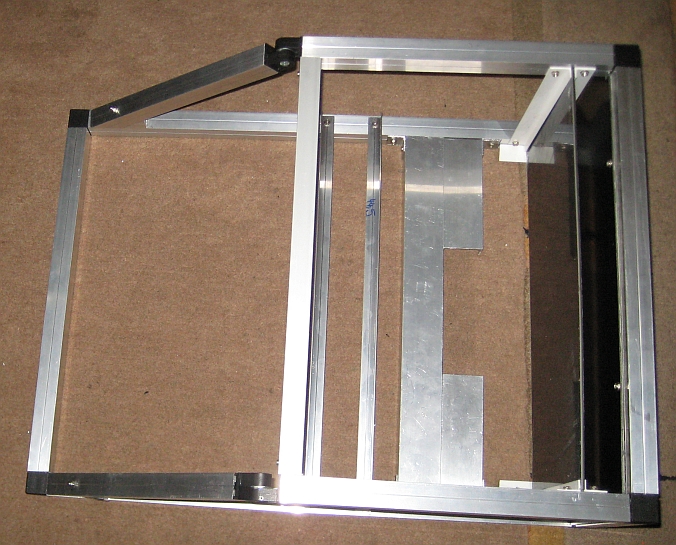
Diese Variante wurde aus einem handelsüblichen Alu-Stecksystem gefertigt.
Länge ca. 550 mm, Breite ca. 400, Höhe ca. 150 mm. Dies sind Innenmaße, die Außenmaße erhöhen
sich entsprechend
der verwendeten Materialstärke des Stecksystems. Hier wurde eine Materialstärke von 23,5 mm
verwendet. Die Seiten werden mit Hart-PVC-Platten bestückt, so dass sich leicht ein stabiles
Gehäuse herstellen lässt.
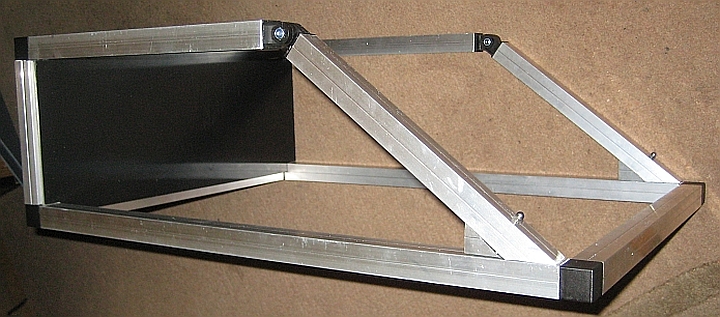
Die hintere Seite wird als Bedienfläche für Taster, Schalter und Display benutzt werden.

Die Seitenteile werden mit Hart-PVC-Platten verkleidet:
Jetzt bereits zu erkennen (von rechts nach links):
Bedienplatte für Taster und Display, gleichzeitig hinterer Abschluß
Grundplatte für die Elektronik, von oben einschiebbar, seitlich geführt
Rahmenkonstruktion aus zwei U-Profilen als Befestigung für Motoren, Achsantrieb
und Radlagerungen
Zwei Winkel-Führungsschienen als Batteriehalterung,
zur Zeit ausgelegt für einen oder zwei Stück 12 Volt 7,2 Ah Blei-Akkus:
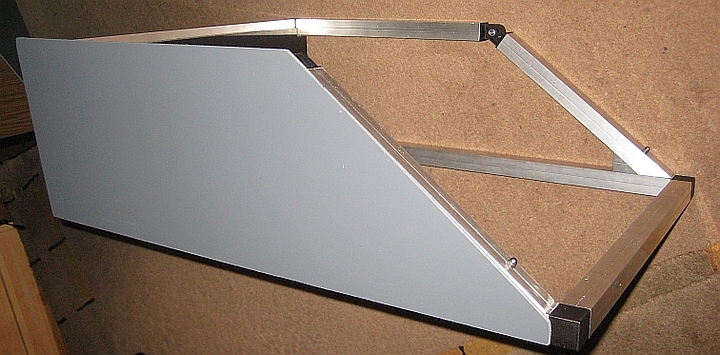
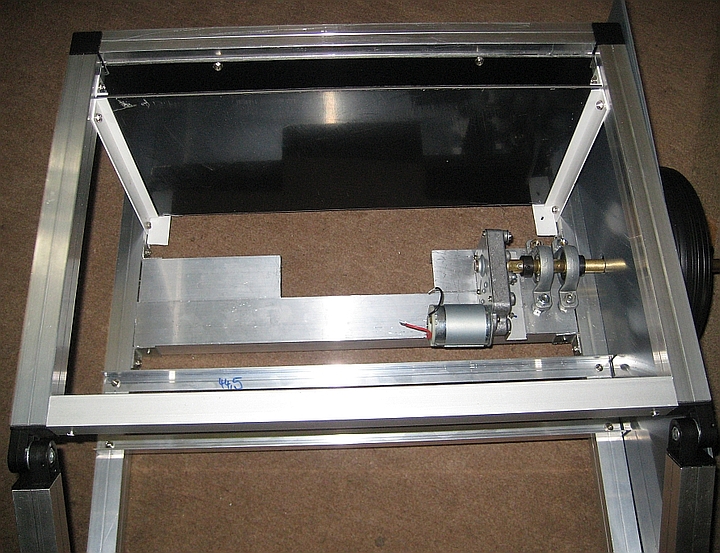
Aus anderer Perspektive:

Hier sieht man die voraussichtliche Platzierung des Antriebs links:
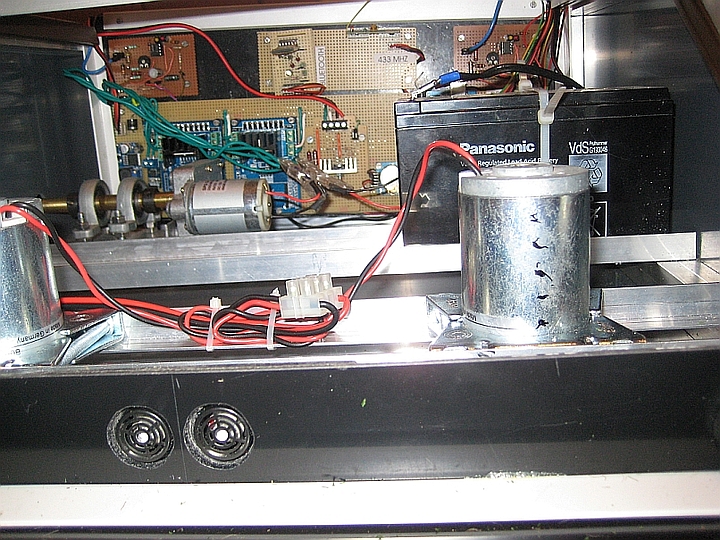
So, die Sommerpause ist vorbei - jetzt geht es mit dem Bau des Mähroboters wieder
voran. Beim Chassis sind schon deutliche Fortschritte zu erkennen. Ãußerlich ist der
Roboter fast fertig, jetzt geht es weiter mit dem Innenleben.


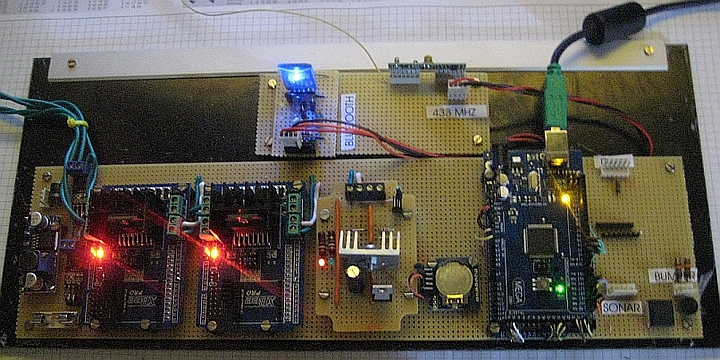
Auch die Elektronik-Hauptplatine wurde weiter entwickelt. Details unter dem Menüpunkt
Elektronik.
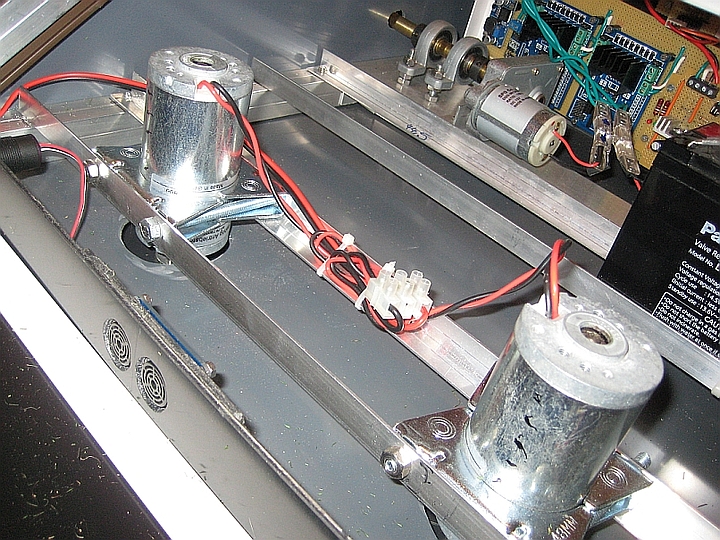
Blick von vorne in das Innere des Chassis:
Die Konstruktion der Motorhalterung ist sehr einfach gehalten. Zwei Winkelprofile
werden in passendem Abstand montiert. Die beiden gegenläufig drehenden Mähmotoren werden
durch je zwei halbe Rohrschellen gehalten. Durch lösen einer Mutter können Sie in der
Höhe verstellt werden: