

Der Mähroboter wird im Wesentlichen aus folgenden Baugruppen bestehen:
Details zum Chassis jetzt unter dem Menüpunkt "Chassis"
2 Mähmotoren mit Messerteller und je 3 Klingen sind für das Schneiden der Grashalme
verantwortlich.
Die Mähteller bestellen aus je 2 Kunststoffscheiben, die wir aus Blumentopf-Untersetzern gefertigt
haben. Auf dem Foto ist nur jeweils eine Kunststoffscheibe zu sehen. Die zweite Scheibe wird so
montiert,das nur noch die Messerenden aus diesen Doppeltellern herausgucken. Die Messer sind
pendelnd befestigt,so das sie bei einem Widerstand nachgeben können. An den Verschraubungen
der Lagerflansche und der Messer wurde der Kunststoff mit Metallscheiben verstärkt,
damit nichts ausreißt.
Seit einiger Zeit verwenden wir ein 4-Zahn-Messer vom Stiga-Autocut mit ca. 300 mm Durchmesser. Dies ist sicherer als die bisher benutzten Messerklingen. Da nur noch ein Mähmotor verwendet wird, ist der Stromverbrauch gesunken. Zudem lässt sich die Mähhöhe bei nur einem Motor leichter einstellen.
2 Getriebemotoren sorgen über 2 Antriebsräder für den notwendigen Vortrieb.
Die Antriebsräder sind Ersatzräder für Rasenmäher mit einem Durchmesser von 180 mm, wie sie in gut
sortierten Baumärkten erhältlich sind. Bei den Getriebemotoren gibt es ein breites Spektrum.
Abhängig vom zu mähenden Grund, also eben oder hügelig, ist ausreichend Leistung gefragt.
Bei ausschließlich ebenen Gelände reichen ca. 3 nm, bei hügeligen Gelände sollte man 4-5 nm
Dauerleistung wählen.

Wir verwenden einen Arduino Mega 2560 und einige Baustufen wie Motortreiber, 433 MHz-Empfänger
usw. Alle Baustufen sind einzeln zu bekommen.
Genaueres später in den 'Hinweisen zum Bau'. Interessenten können sich hier
http://www.ardumower.de vorab informieren.
1 Ultraschall und 2 Infrarotsensoren erkunden die unmittelbare Umgebung
Alle Sensoren sind handelsüblich und preiswert.
2 Akkus mit je 12 V / 3 A halten die Sache am Laufen
Wir haben einfach unsere Werkzeug-Akkus genommen - dann brauchen wir nicht
erneut in Akku und Ladegeräte zu investieren.

Eine kleine Auswahl der benötigten Materialien:
Fernbedienung, Quecksilberschalter, Infrarotsensor, Hauptschalter, Mikroschalter,
Not-Stopp-Taster, Signalgeber
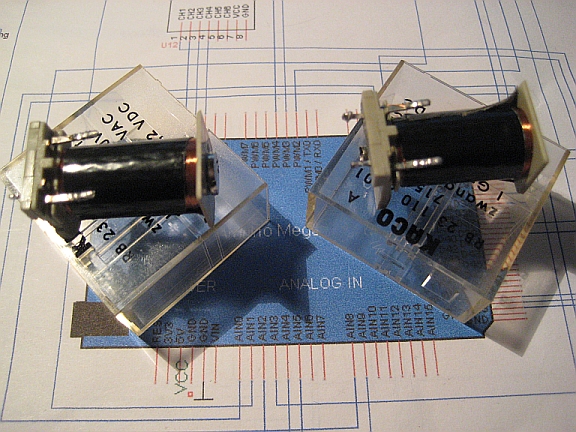
Damit der Roboter den Begrenzungsdraht detektieren kann, benötigt er mindestens
zwei Sensorspulen. Für einen ersten Versuch haben wir Relaisspulen verwendet.
Tipps dazu in den 'Hinweisen zum Bau'.
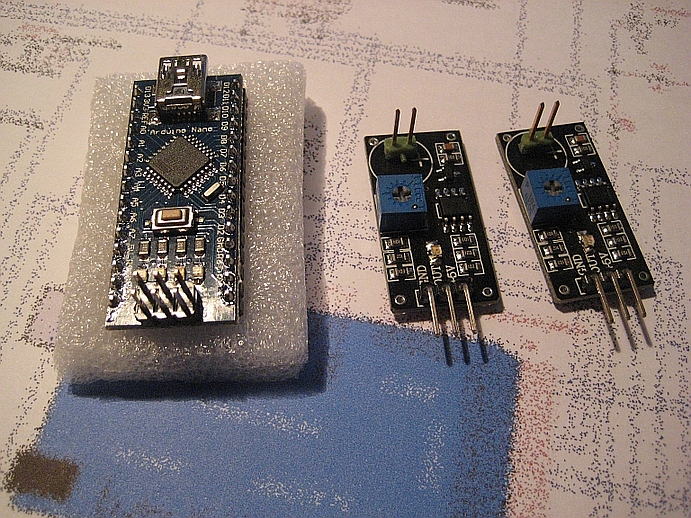
Die Auswertung der Sensorspulen übernimmt ein Arduino Nano, dem zwei
Sound Detectoren vorgeschaltet sind. Die Elektret-Mikrofone wurden entfernt,
an den jetzt dafür vorhandenen Steckerstiften werden die Spulen angeschlossen.
Eine geeignete Open Source Software findet man auf ardumower.de
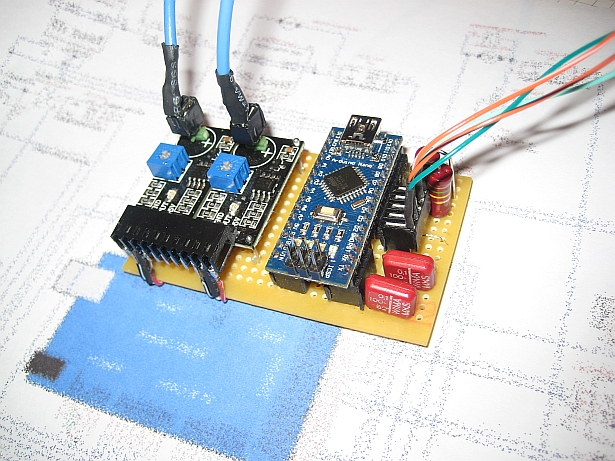
Komplette Baugruppe mit den Sound Detectoren und dem Arduino Nano
Ein Begrenzungsdraht weist den Roboter in seine Schranken.
An einem System, dass ein Mähen ohne Begrenzungsdraht erlaubt und den Mähroboter damit
praktisch auf jedem Grundstück sofort einsetzbar macht, wird noch getüftelt.
Chassis
Details zum Chassis jetzt unter dem Menüpunkt "Chassis"
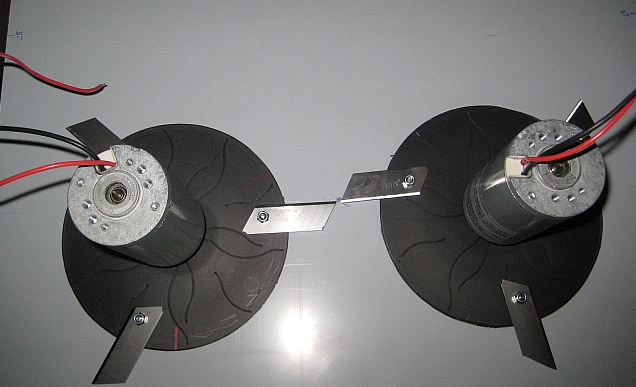
Mähwerk
2 Mähmotoren mit Messerteller und je 3 Klingen sind für das Schneiden der Grashalme
verantwortlich.
Die Mähteller bestellen aus je 2 Kunststoffscheiben, die wir aus Blumentopf-Untersetzern gefertigt
haben. Auf dem Foto ist nur jeweils eine Kunststoffscheibe zu sehen. Die zweite Scheibe wird so
montiert,das nur noch die Messerenden aus diesen Doppeltellern herausgucken. Die Messer sind
pendelnd befestigt,so das sie bei einem Widerstand nachgeben können. An den Verschraubungen
der Lagerflansche und der Messer wurde der Kunststoff mit Metallscheiben verstärkt,
damit nichts ausreißt.
Seit einiger Zeit verwenden wir ein 4-Zahn-Messer vom Stiga-Autocut mit ca. 300 mm Durchmesser. Dies ist sicherer als die bisher benutzten Messerklingen. Da nur noch ein Mähmotor verwendet wird, ist der Stromverbrauch gesunken. Zudem lässt sich die Mähhöhe bei nur einem Motor leichter einstellen.
Radantrieb
2 Getriebemotoren sorgen über 2 Antriebsräder für den notwendigen Vortrieb.
Die Antriebsräder sind Ersatzräder für Rasenmäher mit einem Durchmesser von 180 mm, wie sie in gut
sortierten Baumärkten erhältlich sind. Bei den Getriebemotoren gibt es ein breites Spektrum.
Abhängig vom zu mähenden Grund, also eben oder hügelig, ist ausreichend Leistung gefragt.
Bei ausschließlich ebenen Gelände reichen ca. 3 nm, bei hügeligen Gelände sollte man 4-5 nm
Dauerleistung wählen.
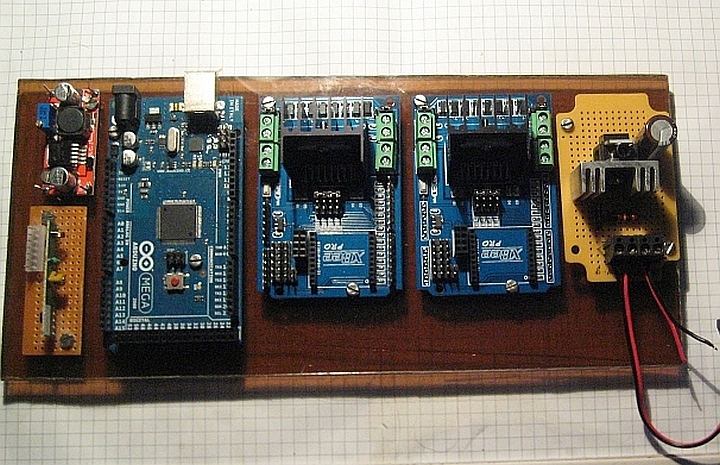
Steuerung
Wir verwenden einen Arduino Mega 2560 und einige Baustufen wie Motortreiber, 433 MHz-Empfänger
usw. Alle Baustufen sind einzeln zu bekommen.
Genaueres später in den 'Hinweisen zum Bau'. Interessenten können sich hier
http://www.ardumower.de vorab informieren.
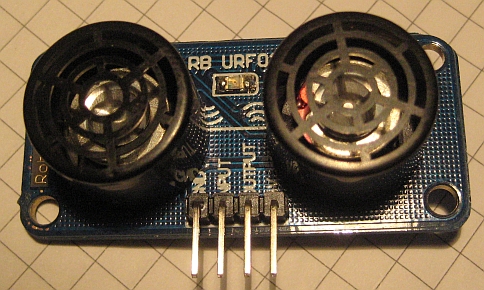
Sensoren
1 Ultraschall und 2 Infrarotsensoren erkunden die unmittelbare Umgebung
Alle Sensoren sind handelsüblich und preiswert.
Stromversorgung
2 Akkus mit je 12 V / 3 A halten die Sache am Laufen
Wir haben einfach unsere Werkzeug-Akkus genommen - dann brauchen wir nicht
erneut in Akku und Ladegeräte zu investieren.
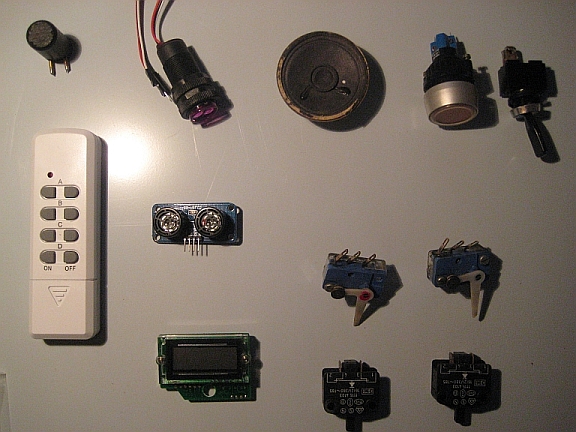
Kleinmaterial
Eine kleine Auswahl der benötigten Materialien:
Fernbedienung, Quecksilberschalter, Infrarotsensor, Hauptschalter, Mikroschalter,
Not-Stopp-Taster, Signalgeber
Sensorspulen
Damit der Roboter den Begrenzungsdraht detektieren kann, benötigt er mindestens
zwei Sensorspulen. Für einen ersten Versuch haben wir Relaisspulen verwendet.
Tipps dazu in den 'Hinweisen zum Bau'.
Auswertung Sensorspulen
Die Auswertung der Sensorspulen übernimmt ein Arduino Nano, dem zwei
Sound Detectoren vorgeschaltet sind. Die Elektret-Mikrofone wurden entfernt,
an den jetzt dafür vorhandenen Steckerstiften werden die Spulen angeschlossen.
Eine geeignete Open Source Software findet man auf ardumower.de
Komplette Baugruppe mit den Sound Detectoren und dem Arduino Nano
Sicherheit
Ein Begrenzungsdraht weist den Roboter in seine Schranken.
An einem System, dass ein Mähen ohne Begrenzungsdraht erlaubt und den Mähroboter damit
praktisch auf jedem Grundstück sofort einsetzbar macht, wird noch getüftelt.